安川機器人原點及校準淺析
何謂原點�����?
既然說到原點校準,那么就要來探討一下���,什么是機器人原點�?安川機器人的隨機資料中有這樣一句話:原點位置校準是將“機器人位置”與“編碼器位置”進行對照確認�。
安川機器人位置:
各大品牌機器人都有所謂的原點標記,也就是在本體上各軸或者關節處能看到的標識點����,安川的大部分機器人是紅色箭頭加刻度線。
編碼器位置:
建議大家到網上百度下關于編碼器的資料�����,以方便更好的理解)編碼器反饋到機器人上就是脈沖值��。
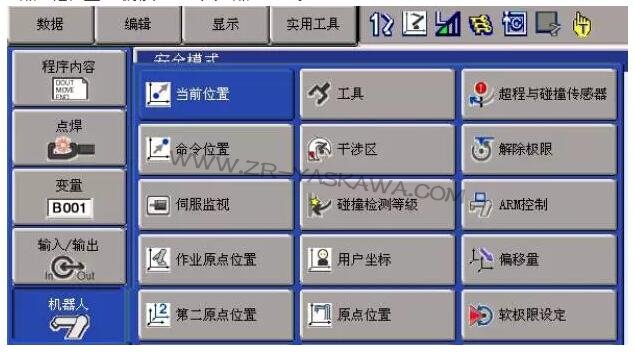
安川機器人有個菜單�����,叫做“當前位置”�,此菜單下調整顯示“脈沖值”,當脈沖值調整為“0”時�,若“原點標記位置”無偏移則機器人原點無問題。
原點是機器人一切動作的基準點���!
機器人出廠時已校準過原點位置校準,但下列情況需要再次校準原點位置:
更換機器人和控制柜(DX200)的組合時���;
更換電機或者編碼器時����;
內存被刪除時��,(更換內存基板����、本體編碼器電池耗盡、控制柜內存儲電池耗盡時等)����;
機器人與工件發生碰撞導致原點位置偏離時甚至產生輕微形變。
那么原點丟失我們該如何進行操作����?
原點丟失有兩種情況:
A、丟失個別軸的原點���;B、丟失所有軸原點���。
全部軸同時創建:更換機器人和控制柜的組合時���,全部軸同時登錄原點位置。
各軸單獨創建:更換馬達或編碼器時�,單獨登錄馬達或編碼器對應的各軸原點位置。
無論進行全部軸同時創建還是各軸單獨創建����,我們要做的第一步都是:
在關節坐標系下����,使用[軸操作鍵]調整機器人的姿勢,用肉眼目測���,使各軸的“原點標記位置”一致�。然后在機器人菜單下進行全軸或者單軸創建。
當然���,用肉眼進行原點校準�,肯定存在一定誤差���,但是可以滿足正常生產�,保證機器人及程序正常運行�,注意程序點是需要微調的�����。