一����、XRC控制器概況
安川機器人PLC編程XRC控制器是用來執(zhí)行邏輯、記時����、計數(shù)等順序控制功能����,建立柔性的程控系統(tǒng)����。它采用可編程序的存貯器,用來在其內(nèi)部存貯執(zhí)行邏輯運算����、順序控制、定時����、計數(shù)和算術運算等操作的指令,并通過數(shù)字的輸入和輸出����,控制各種類型的機械或生產(chǎn)過程。具有通用性強����、使用方便、適應面廣、可靠性高����、抗干擾能力強����、編程簡單等特點。
二����、XRC控制器結構及基本配置
安川機器人PLC編程XRC控制器主要有CPU模組、I/O模組����、電源模組、底板機架����、編程顯示(教導器)、伺服驅動及放大器����。
1、CPU的構成
安川機器人PLC編程CPU是控制器的核心����,起神經(jīng)中樞的作用����,它按控制器的系統(tǒng)程序賦予的功能接收并存貯用戶程序和數(shù)據(jù)����,用掃描的方式采集由現(xiàn)場輸入裝置送來的狀態(tài)或數(shù)據(jù),并存入規(guī)定的寄存器中����,同時,診斷電源和內(nèi)部電路的工作狀態(tài)和編程過程中的語法錯誤等����。進入運行后,從用戶程序存貯器中逐條讀取指令����,經(jīng)分析后再按指令規(guī)定的任務產(chǎn)生相應的控制信號,去指揮有關的控制電路����,控制器主要由運算器、控制器����、寄存器及實現(xiàn)它們之間聯(lián)系的數(shù)據(jù)����、控制及狀態(tài)總線構成����。CPU的控制器控制CPU工作����,由它讀取指令、解釋指令及執(zhí)行指令����。
安川機器人CPU的運算器用于進行數(shù)字或邏輯運算,在控制器指揮下工作����。
安川機器人CPU的寄存器參與運算,并存儲運算的中間結果����,它也是在控制器指揮下工作。
2����、I/O模組:
控制器對外功能����,主要是通過I/O模組上的接口與外界聯(lián)系的����,I/O模塊集成了控制器I/O電路,其輸入暫存器反映輸入信號狀態(tài)����,輸出點反映
輸出鎖存器狀態(tài)。與編程相聯(lián)系的主要是泛用輸入/輸出接頭CN10,CN11����、CN12, CN13共80點。
3����、電源模塊:
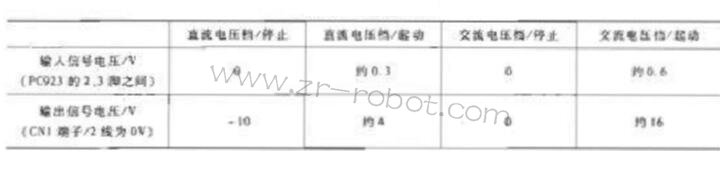
電源供應模組提供控制器各模塊的集成電路提供工作電源,同時����,還為輸入電路提供24V的工作電源。電源輸入類型:直流電源����,電壓為24V����。
4����、底板或機架:
底板或機架,其作用是:電氣上����,實現(xiàn)各模塊間的聯(lián)系����,使CPU能訪問底板上的所有模塊,機械上����,實現(xiàn)各模塊間的連接個使各模塊構成一個整體。
5����、外部設備
1.教導器:用于編程、對系統(tǒng)作一些設定����、監(jiān)控I/O及控制器所控制的系統(tǒng)的工作狀況����。教導器是XRC控制器開發(fā)應用����、監(jiān)測運行、檢查維護不可缺少的器件����,但它不直接參與現(xiàn)場控制運行。
2.存儲設備:PC卡����,用于永久性地存儲用戶數(shù)據(jù),使用戶程序不丟失����。