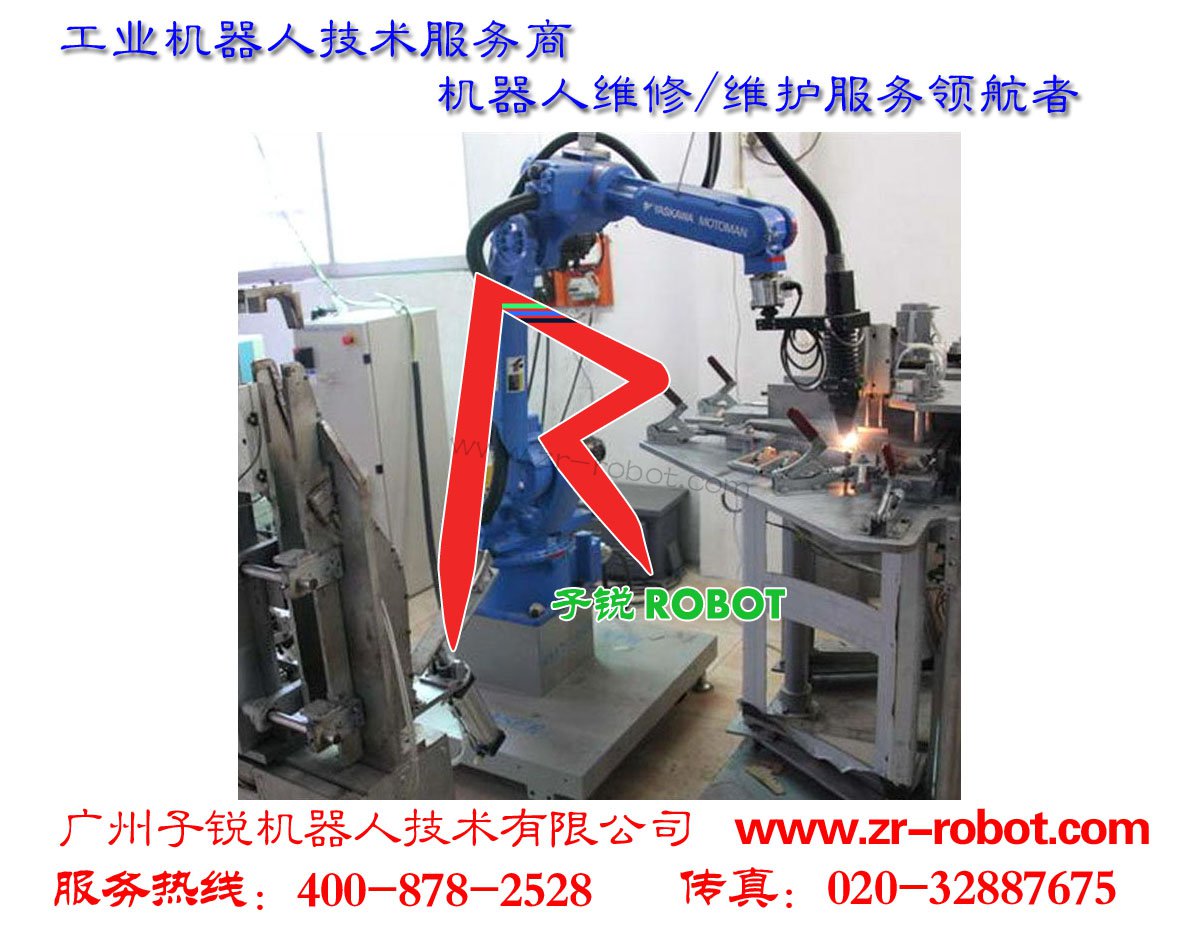
YASKAWA機器人ES165D維修在運行過程中出現了明顯的晃動���,這一現象對點焊作業造成了嚴重的干擾����,以至于不得不暫時停機���。經過細致檢查�,發現機械手的一軸及手腕部位均存在較大的間隙����,尤其是一軸的減速機與機器人手腕單元,磨損情況尤為嚴重�,已經到了需要更換的地步。現場作業的條件卻相當有限���,機械手周圍的空間狹小�,且有護欄與頂棚的防護���,頂部管道密布���,這使得拆裝一軸的工作不僅僅是考慮機械手本身的拆裝那么簡單����,還需要綜合考慮周邊的環境因素�。
為了進行更換作業�,先搭建了機器人的吊裝系統,并反復確認其穩固性�,以確保整個拆裝過程中的安全。他們小心翼翼地進行了機器人本體與一軸的分離���,將分離的部分平穩地放置在一個平整的臺面上�。他們拆除了損壞的一軸減速機�,并對底座進行了徹底的清潔,為安裝新的減速機做好準備���。
在安裝新的一軸減速機時���,格外謹慎,確保每一個步驟都準確無誤����。他們再將移出的本體裝回原位,并注入適量的油脂以保證潤滑。復原連接后����,他們對各螺絲進行了扭力確認,并進行了相應的標記����,以確保連接的牢固性。
將機器人的位置調整到合適的姿態�,然后拆卸了夾具,以便對手腕部位進行拆除����。在清潔連接桿傳動處時,他們仔細確認了無油污等雜質的存在���,以確保新手腕的安裝能夠順利進行����。安裝新手腕后����,夾具也被復原安裝到位。
關于YASKAWA機器人ES165D維修常見的機械部件磨損現象����,主要包括以下幾個方面:
· 電極帽在焊接過程中會因氧化而變黑���,導致焊接質量下降,出現開焊���、炸點等問題���;
· 焊槍的壓力可能會隨著使用時間的增加而發生變化����,影響焊接質量;
· 機械部件如關節����、齒輪等也會發生磨損;
· 導致機械手的精度下降����,甚至影響其正常工作。
在進行YASKAWA機器人ES165D維修此類作業時����,需要注意以下幾點:
· 對現場環境進行詳細的勘察是非常必要的���,以便制定出合理的施工方案,節省時間并確保作業安全���;
· 在作業時佩戴好勞保用品���,并留意外圍線路,避免扯到或絆倒給設備及自身帶來損失�;
· 在進行安川機器人維修吊裝時要確認吊點是否牢固,檢查吊帶有無破損開裂�,起吊時下方切勿站人。
對于機械手的維護����,提出以下建議:
· 定期清潔機器人,去除油污���、灰塵���、殘留物等雜質;
· 根據設備使用年限及使用環境及時做好換油保養工作���,確保各軸的潤滑�;
· 定期檢查機械結構的緊固及磨損情況,及時發現異常并避免意外發生����;
· 維護記錄要存檔以備查,以便在發生異常時YASKAWA機器人ES165D維修能夠追蹤設備使用情況并做出合理的應對措施���。