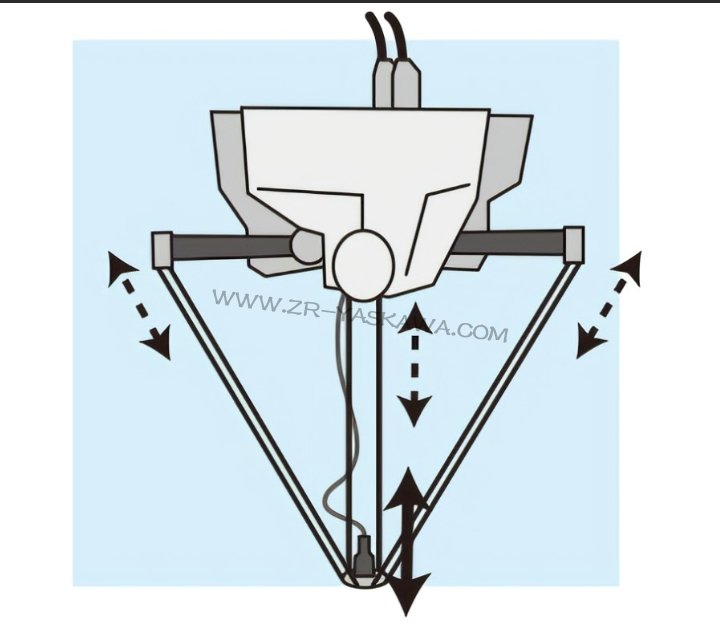
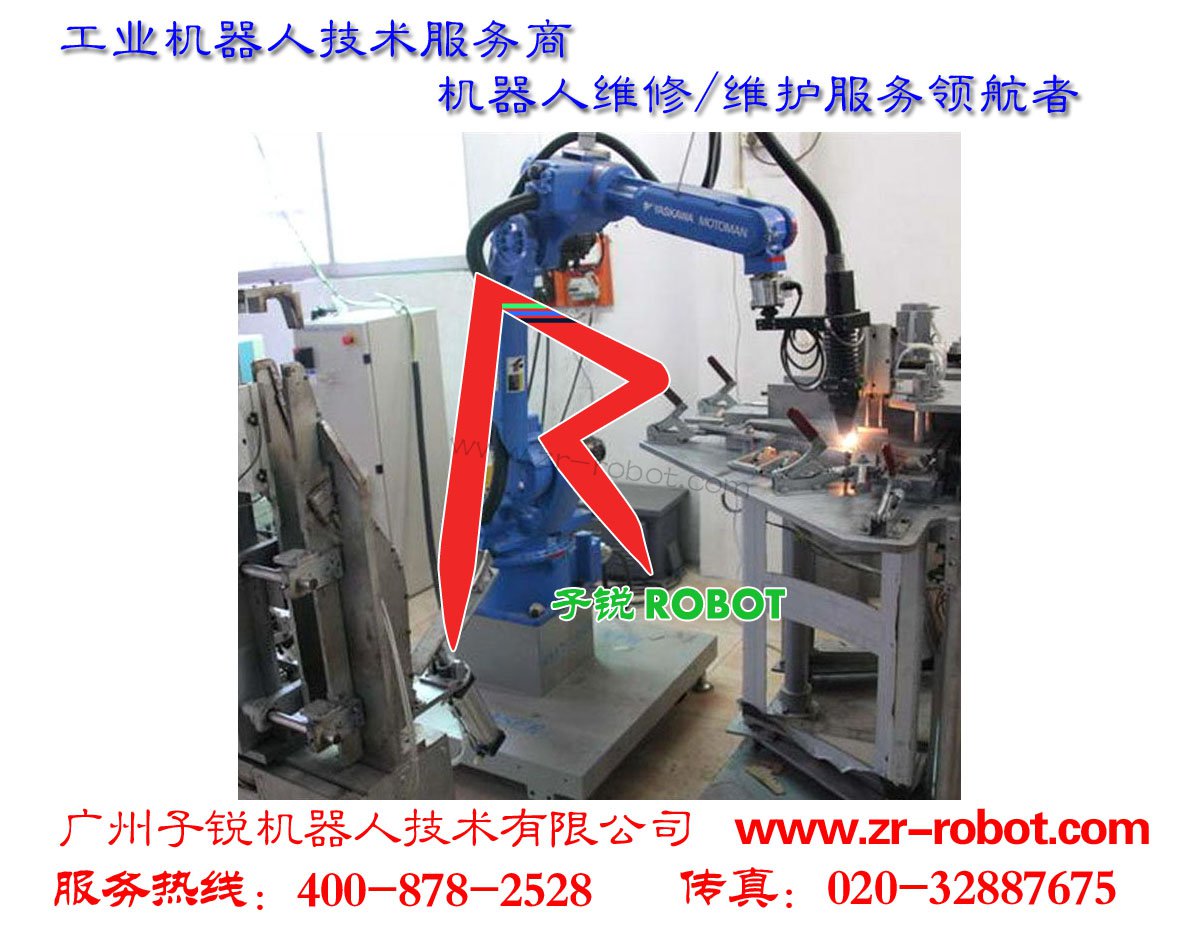
安川蜘蛛手并聯機器人,作為一款專為高速��、輕載作業設計的并聯機器人��,又常被業界親切地稱為分揀機器人���。它巧妙地利用三個并聯的伺服軸��,精準地確定抓取中心位置��,從而高效地實現目標物體的運輸或加工任務�����。這款機器人的特性顯著�����,集高速��、精準�����、開放性和卓越的承載能力于一身���。其操作方式靈活多樣,既可通過示教編程輕松上手�����,又能借助先進的視覺系統精準捕捉目標物體���。它還支持視覺模塊、IO模塊的便捷添加,承載能力更是達到了3kg及以上,充分滿足了多樣化的作業需求。
談及安川蜘蛛手并聯機器人維修的優勢��,以下幾點尤為突出:
精確抓取能力令人矚目�����。得益于先進的視覺識別系統和精密的運動控制技術��,機器人能夠準確無誤地識別和抓取各種形狀、尺寸及重量的物料�����,極大地降低了分揀過程中的錯誤率�����,提升了作業效率。
靈活性方面同樣表現出色。其六自由度的設計賦予了機器人在狹小空間內靈活操作的能力,無論是多么復雜的分揀環境和需求,都能輕松應對��,展現出強大的適應能力�����。
高速分揀更是其拿手好戲��。得益于并聯機器人結構的優勢和高性能運動控制系統的加持���,機器人能夠以驚人的速度進行連續分揀作業���,顯著提升了生產效率,為企業創造了更大的價值�����。
在節省人力方面���,YASKAWA并聯機器人同樣功不可沒��。自動化分揀系統的引入���,不僅大幅減少了人工操作,降低了勞動力成本��,還有效提升了工作環境的安全性,為員工提供了更加舒適���、安全的作業環境���。
安川蜘蛛手并聯機器人維修究竟是如何實現這些卓越性能的呢?其工作原理主要涵蓋以下幾個部分:
首先是控制部分��。一個高效�����、精準的控制系統是機器人正常運作的核心��。這個系統可以是硬件系統���,也可以是軟件系統�����,它們都需要根據預設的運動軌跡��,精確計算出每個關節的運動參數��,并將這些參數發送給驅動器��,驅動機器人按照預設軌跡進行運動��。
其次是執行部分��。執行部分主要由各個關節組成��。每個關節都配備了獨立的驅動器和控制系統��,可以獨立進行運動�����。然而�����,當多個關節協同工作時���,就需要控制系統來精確協調它們的運動,以確保實現對物體的精細操作���。
此外��,視覺識別系統和智能算法也是不可或缺的一部分�����。安川蜘蛛手并聯機器人搭載了先進的視覺識別系統和智能算法���,能夠實時對海量物品進行定位���、識別和追蹤,實現智能化��、無人化的流水線作業��,大大提高了作業的準確性和效率��。
驅動部分同樣至關重要�����。每個關節都配備了一個獨立的驅動器�����,這些驅動器可以是電機�����、氣缸或其他類型的驅動器。它們為關節提供動力�����,使其能夠按照控制系統的指令進行運動�����。
最后值得一提的是其模塊化設計�����。安川蜘蛛手并聯機器人維修采用了模塊化的設計理念��,使得維護更加簡便��,使用壽命更長���。同時,穩定的運行性能也確保了投資的高回報率���,為企業帶來了更多的經濟效益��。
綜上所述�����,安川蜘蛛手并聯機器人維修通過驅動���、控制和執行三個部分的緊密協作��,結合先進的視覺識別系統和智能算法���,實現了對物體的精細操作。在物流分揀��、工業生產等領域展現出了強大的效能和廣泛的應用前景�����。