本文是國(guó)內(nèi)首篇從維修實(shí)際情況出發(fā)結(jié)合當(dāng)前較新型硬盤對(duì)其電路原理加以分析介紹的文章由于資料的缺乏以及本人的水平文中一定存在諸多錯(cuò)誤這里歡迎大家批評(píng)指正
一總論
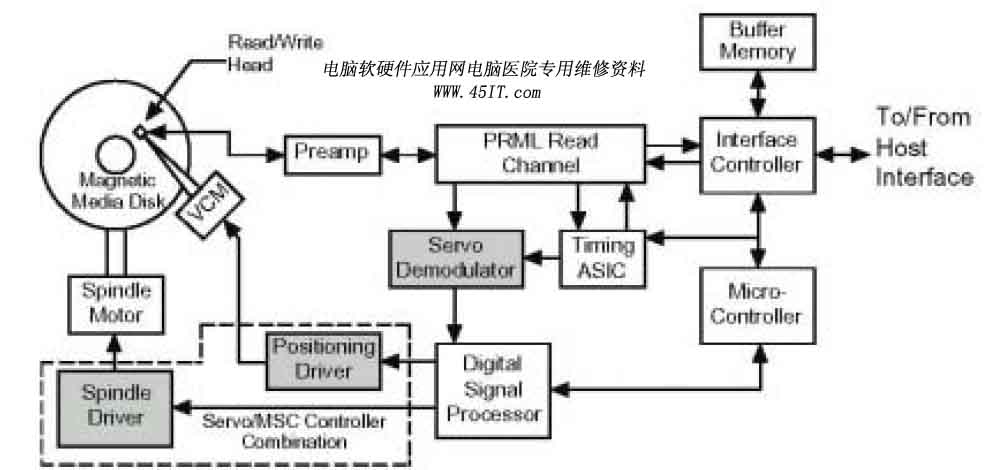
硬盤電路示意框圖
這里給出一個(gè)完整詳細(xì)的硬盤電路示意框圖它由14 個(gè)小的部分組成1.Buffer Memory,緩沖區(qū)存儲(chǔ)器2.Interface Controller,接口控制器3.Micro-Controller,微控制器通常縮寫為MCU U 是unit 的開(kāi)頭字母4.PRML Partial-Response Maximum-Likelihood ReadChannel, 部分回應(yīng)最大相似讀取通道5.Timing ASIC Application Specific Integrated Circuit , 定時(shí)專用集成電路6.Servo Demodulator, 伺服解調(diào)器7.Digital Signal Processor(DSP),數(shù)字信號(hào)處理器8.Preamp,預(yù)放大器9.Positioning Driver,定位驅(qū)動(dòng)器10.VCM(Voice Coil Motor),音圈電動(dòng)機(jī)11.Magnetic Media Disk,磁介質(zhì)盤片12.Spindle Motor,主軸電機(jī)13.Spindle Driver 主軸驅(qū)動(dòng)器14.Read/Write Head,讀/寫磁頭實(shí)際電路不會(huì)有這么多一片一片的獨(dú)立芯片硬盤生產(chǎn)廠家在設(shè)計(jì)電路時(shí)都是選取高度集成的IC芯片既減小了體積又提高了可靠性當(dāng)然這也正是芯片廠商努力的目標(biāo)大家可以看到上面的示意圖中Spindle Driver 與Positioning Driver 這兩部分被用虛線圈了起來(lái)并且標(biāo)注了Servo/MSC Controller Combination 字樣,其中MSC 是Motor Speed Control 的縮寫整個(gè)的意思是伺服/電機(jī)速度控制控制器組合我們現(xiàn)在能看到的硬盤電路板就有這么一塊合并芯片當(dāng)然這片IC 內(nèi)部還不止包括上述的兩部分還有個(gè)very very 重要的部分電源比如昆騰CX LCT 系列用的AN8428/TDA5247 老型西數(shù)用的L6256 西捷U8 U10 用的23400278 002 等都是這樣很多設(shè)計(jì)中除了上面提及的IC 內(nèi)部的電源部分還會(huì)根據(jù)需要設(shè)計(jì)一些獨(dú)立出來(lái)的電源大家可以在電路板上看到磁頭電路用的8V 穩(wěn)壓IC MCU 用的3.3V/2.5V IC 實(shí)際上我們現(xiàn)在能看到的硬盤Interface Controller Micro-Controller及DSP 這三部分也被Combination 了邁拓硬盤就采用了TI 的DSP 將上面的三部分All In One 了只有老型號(hào)的西數(shù)和上圖較接近MCU 采用了80C196NU DSP 及主機(jī)接口采用了WD69C24 其實(shí)我覺(jué)得DSP 與MCU 發(fā)展到今天似乎日益趨同有IC 生產(chǎn)廠已推出DSP 型MCU但就目前而言MCU 在速度方面還不是DSP 的對(duì)手這里實(shí)際還少了一樣?xùn)|西ROM 上圖沒(méi)有標(biāo)出是因?yàn)橛行┯脖P電路中ROM 已經(jīng)集成到MCU/DSP 中了最典型就是昆騰的電路當(dāng)然現(xiàn)在我們可以看到的硬盤電路板上ROM 多是獨(dú)立出現(xiàn)的型號(hào)多采用ST 的M29F102BB,WINBOND 的W49L102 ATMEL 的AT49F1024 等可電擦寫芯片這樣設(shè)計(jì)的好處是顯而易見(jiàn)的工廠可以在發(fā)現(xiàn)BUG 時(shí)讓用戶通過(guò)象刷寫主板BIOS 一樣更新硬盤的ROM
新聞熱點(diǎn)






疑難解答
圖片精選